

Mô phỏng điều khiển tàu ngầm
Các tiến bộ công nghệ trong phát triển phần mềm điện toán thủy động học CFD (Computational Fluid Dynamics Điện Toán Thủy Động) cho phép chinh phục những thách thức cao về mô phỏng máy tính trong điều khiển tàu ngầm. Bài viết dưới đây sẽ nêu ra công nghệ mô phỏng CD-adapco được ứng dụng như thế nào trong các chuyển động của tàu ngầm dưới sự ảnh hưởng các lực thủy động lực, các tính toán chính xác, và các kết quả tính toán được so sánh với các thông số thực nghiệm.
Việc mô phỏng điều khiển tàu ngầm với kích thước nguyên mẫu trên cơ sở các nguyên lý vật lý dựa trên các ứng dụng thủy động học máy tính là một dự án tốn kém. Chủ yếu do nhiều số liệu về hệ số chiều dài và thời gian, chúng cần phải được giải để tính dòng chảy xung quanh thân tàu một cách chính xác. Một thách thức nữa là việc mô tả tổng thể phức tạp hình học của tàu và bộ phận động lực gắn với tàu. Hệ số chiều dài trải rộng từ lớp vỏ rất mỏng đến chiều dài toàn bộ của tàu ngầm. Hệ số thời gian trải rộng từ một phần chuyển động của chuyển động chân vịt đến toàn phần thời gian được điều khiển – hay có khi lâu hơn, khi có nhiều điều khiển được kết hợp trong một mô phỏng duy nhất. Sự chênh lệch trong các hệ số này đòi hỏi các lưới tính toán và thời gian mô phỏng rất lớn, điều này đòi hỏi tài nguyên tính toán và năng lực tính toán phải đối mặt trước một thách thức lớn nếu so với khả năng kỹ thuật hiện nay. Tàu ngầm đang đề cập được vận hành bởi chân vịt xoay có ba cánh. Việc điều khiển được thực hiện thông qua bánh lái và bánh lái dưới phía sau. Ở đây việc điều khiển được thực hiện thông qua sự thay đổi vị trí của các bề mặt điều khiển được xem như là phản hồi cho chuyển động của tàu ngầm được tính nhờ mô phỏng. Phương pháp số trong một điều khiển, tàu ngầm luôn thay đổi vị trí và hướng của nó như là một phản ứng với (trường) áp uất, được tạo thành thông qua tác động của các bề mặt điều khiển. Việc mô phỏng điều khiển đòi hỏi cách giải kết hợp các phương trình cho một thân tàu cứng (đối với sáu mặt chuyển động tự do) và các phương trình Reynolds-, Navier-Stokes (URANS).
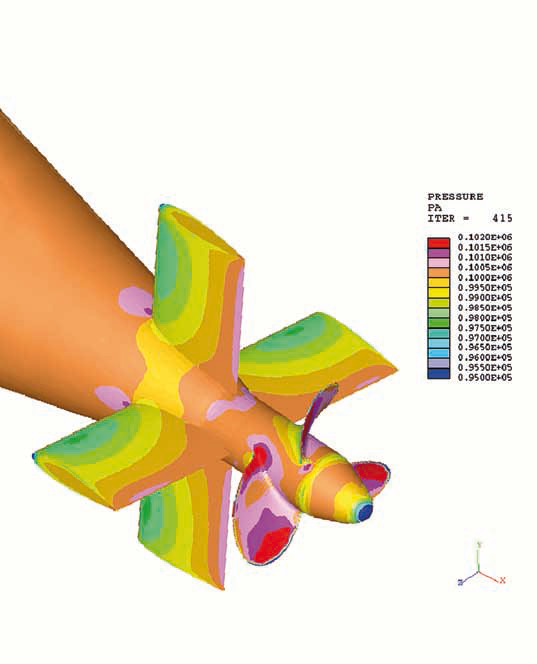
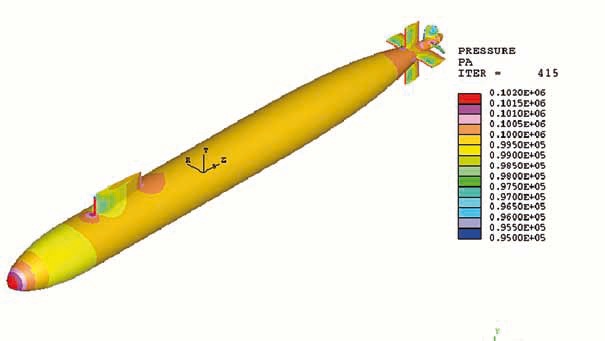
Phân bố áp suất lên bề mặt với các đường biểu diễn
Việc giải phương trình URANS vận dụng mô hình tích phân thời gian lặp toàn ẩn. Trước hết là tính (trường) dòng chảy quanh thân tàu và tích phân, sau đó đến ứng suất trượt và phân bố áp suất trên bề mặt thân tàu, qua đó ta có thể biết momen và lực thủy động lực tác dụng lên nó. Sau đó các phương trình chuyển động sẽ được giải nhằm xác định các tịnh tiến và xoay tức thì. Các dữ liệu này được dùng để cập nhật lưới tính toán, nó sẽ được xoay và được chuyển đổi như một vật cứng trong hệ quy chiếu tham chiếu. Tích phân và chuyển động của lưới tính tự động thực hiện mỗi khi chạy ứng dụng Dynamic Fluid-Body Interaction-Modells (DFBI) từ CD-adapco. Thông qua đồng quy các quá trình lặp lại tại mỗi bước thời gian mà người ta biết được quỹ đạo chuyển động của thân tàu. Tính tự nhiên tiềm ẩn của phương pháp (các phương trình chuyển động được tính cùng lúc với (trường) dòng chảy) là rất quan trọng để đảm bảo sự ổn định chung của mô phỏng, không sử dụng bước thời gian nhỏ và không thực tiễn. Mạng tính toán Vùng hữu hạn hình thành từ ba triệu ô, bao gồm cả các lớp vỏ ô lăng trụ bên cạnh các lớp thành, được cho trước, để tính các lớp bên cạnh lớp thành. Mạng tính toán được lập thông qua phương pháp mạng lưới lục giác tạo từ CD-adpco: một mạng tính chìm sáu cạnh được tạo thành bên trong các biên giới của các vùng tính toán trùng với hình dạng tàu ngầm. Các ô lục giác hoàn toàn nằm trong thân tàu, và lớp đứng được xóa đi, trong khi các lớp cắt ngang lớp này, để xóa bất kỳ sự trùng lặp nào, được cắt đi.
Với phần mềm CFD có thể vượt qua được thử thách mô phỏng số diễn tập tàu ngầm
Tiếp theo mạng tính toán được làm tinh hơn trong các vùng, những nơi được cho là có sự dao động dòng chảy lớn. Cánh quạt được đặt bên trong các khối mạng tính hình trụ, quay quanh trục cánh quạt, ở đây có giao thoa trượt giữa khối mạng tính hình trụ và vùng chất lỏng bao quanh. Các chuyển động của các mặt bánh lái được tính thông qua việc vận dụng việc biến dạng của mạng tính toán. Do bánh lái được điều khiển qua mỗi bước thời gian sang một vị trí mới nên mạng tính toán trong khối sẽ biến dạng và trượt. Nhờ vận dụng phương pháp này mà sự mô phỏng toàn bộ chỉ phải tạo một mạng tính toán duy nhất – thay vì rất nhiều mạng tính toán cho các vị trí khác nhau của bánh lái và sự trượt giữa chúng. Do chuyển động mạng lưới cho bánh lái trong phương pháp này có thể được tích hợp nên đòi hỏi ít nhập liệu từ người dùng hơn. Mô phỏng điều khiển trong trường hợp đường điều khiển không đổi và độ sâu lớn, thì tàu ngầm chạy qua một vùng vô hạn trong nước. Sự chuyển động của tàu ngầm được điều khiển qua chân vịt ba cánh, bánh lái, và bánh lái dưới phía sau. Ở đây được cho rằng mạng lưới tính toán tổng thể chuyển động, bao gồm cả thân tàu, cùng với thân tàu và không có sự biến dạng. Các tính toán cho (trường) dòng chảy được thực hiện rong khuôn khổ tham chiếu, nó làm đơn giản hóa tính riêng biệt của các điều kiện giao nhau. Do thân tàu chuyển động xuyên qua thể tích vô hạn của nước không di chuyển nên tốc độ ở nơi giao nhau các trường là bằng không. Trong trường hợp điều khiển mạnh theo phương ngang thì các bề mặt trên và dưới của bánh lái được tác động, nhằm thực hiện việc điều khiển. Khi thí nghiệm, bánh lái trước hết được điều khiển góc nghiêng 10 độ và giữ ở vị trí này, đến khi thân tàu đạt được góc trượt 30 độ. Bánh lái sau đó được xoay chiều. Ảnh 1 chỉ ra kết quả phân bố áp lực lên thành và hướng dòng chảy sau cánh quạt. Cân bằng thời gian tính toán cho di chuyển, lặn và góc trượt ở đây trùng với các kết quả đo được,
Kết luận: giữa các kết quả tính toán và các đo đạc thử nghiệm điều khiển đã chỉ ra các kết quả rất tốt trùng khớp. Các kết quả mong muốn cho thấy tính phù hợp của phương pháp được đề xuất cho mô phỏng điều khiển tàu ngầm và các chuyển động của các phương tiện tương đương tự di chuyển ngầm dưới nước. Các công cụ mô phỏng điện toán thủy động học sẽ giúp các kỹ sư tối ưu hóa các thiết kế và phân tích và các khả năng điều khiển, nhằm làm tốt hơn khả năng hoạt động và giá thành tàu ngầm.
(Theo Ship and Offshore 2014)
